Alat Pengukur Kelembaban Tanah Dengan AVR ATMEGA 8535
Alat ini saya modifikasi dari rangkaian pada soil moisture Tester 😀 😀 . Pada rangkaian tersebut yang menjadi pengolah pembacaan sensor hingga menjadi output dengan menggunakan IC LM3914. Output yang dihasilkan berupa indikator led, berjumlah 10. Pada alat yang saya buat, menggantikan IC LM3914 dan indikator led dengan sebuah mikrokontroler dan LCD 2×16. Secara dasar input sebuah sensor berupa sinyal analog yang nantinya diubah menjadi sinyal digital. Klo sewaktu kuliah dulu, namanya ADC (analog digital converter) 😀 😀 . Karena kebetulan ada temen yang meminta tolong untuk membuatkan alat ini sebagai Penulisan Ilmiahnya “Kok gw yang ngerjain alatnya yach” 😀 😀 . Lumayan buat nambahin beli gitar fender uangnya 😀 :D. Karena di ATMEGA8535 terdapat ADC internal didalamnya, maka saya memanfaat ADC tersebut sebagai pengolah sensornya nanti “biar sedikit pengurangi pengeluaran belanja komponen”. Ok, kita mulai dengan bahan-bahannya yang dibutuhkan.
1. Modul DT-AVR (Low Cost Micro System) + isp programmer dari Innovative Electronics
2. LCD 2×16
3. CodevisionAVR (Full Version)
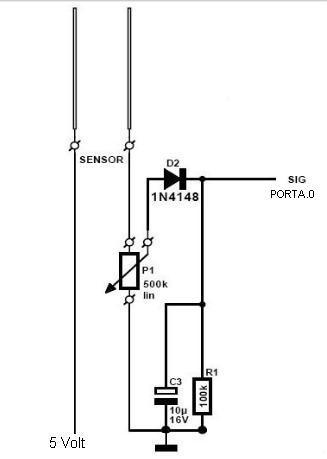
4. Sensor kelembaban seperti gambar dibawah
Berikut Source Codenya
#include
#include
#include
// Alphanumeric LCD Module functions
#asm
.equ __lcd_port=0x18 ;PORTB
#endasm
#include
#define ADC_VREF_TYPE 0x60
char buf[33];
unsigned char dtadc;
// Read the 8 most significant bits
// of the AD conversion result
unsigned char read_adc(unsigned char adc_input)
{
ADMUX=adc_input|ADC_VREF_TYPE;
// Start the AD conversion
ADCSRA|=0x40;
// Wait for the AD conversion to complete
while ((ADCSRA & 0x10)==0);
ADCSRA|=0x10;
return ADCH;
}
//Konversi Dari Hexa ke Desimal
void tampil(unsigned char dat)
{
unsigned char data;
data = dat / 100;
data+=0x30;
lcd_putchar(data);
dat%=100;
data = dat / 10;
data+=0x30;
lcd_putchar(data);
dat%=10;
data = dat + 0x30;
lcd_putchar(data);
}
//Tampilan Led Baris 1
void display()
{
if (dtadc==0){
lcd_gotoxy(0,0);
lcd_putsf(" ");
}
if ((dtadc>1) && (dtadc<=10)){ lcd_gotoxy(0,0); sprintf(buf,"\xff"); lcd_puts(buf); lcd_putsf(" "); } if ((dtadc>10) && (dtadc<=20)){ lcd_gotoxy(0,0); sprintf(buf,"\xff"); lcd_puts(buf);lcd_puts(buf); lcd_putsf(" "); } if ((dtadc>20) && (dtadc<=30)){ lcd_gotoxy(0,0); sprintf(buf,"\xff"); lcd_puts(buf);lcd_puts(buf);lcd_puts(buf); lcd_putsf(" "); } if ((dtadc>30) && (dtadc<=40)){ lcd_gotoxy(0,0); sprintf(buf,"\xff"); lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf); lcd_putsf(" "); } if ((dtadc>40) && (dtadc<=50)){ lcd_gotoxy(0,0); sprintf(buf,"\xff"); lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf); lcd_putsf(" "); } if ((dtadc>50) && (dtadc<=60)){ lcd_gotoxy(0,0); sprintf(buf,"\xff"); lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf); lcd_putsf(" "); } if ((dtadc>60) && (dtadc<=70)){ lcd_gotoxy(0,0); sprintf(buf,"\xff"); lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf); lcd_putsf(" "); } if ((dtadc>70) && (dtadc<=80)){ lcd_gotoxy(0,0); sprintf(buf,"\xff"); lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf); lcd_putsf(" "); } if ((dtadc>80) && (dtadc<=90)){ lcd_gotoxy(0,0); sprintf(buf,"\xff"); lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf); lcd_putsf(" "); } if ((dtadc>90) && (dtadc<=100)){
lcd_gotoxy(0,0);
sprintf(buf,"\xff");
lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);lcd_puts(buf);
lcd_putsf(" ");
}
}
// Declare your global variables here
void main(void)
{
// Declare your local variables here
// Input/Output Ports initialization
// Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
// State7=0 State6=0 State5=0 State4=0 State3=0 State2=0 State1=0 State0=0
PORTB=0x00;
DDRB=0xFF;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTD=0x00;
DDRD=0x00;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
// Mode: Normal top=FFh
// OC0 output: Disconnected
TCCR0=0x00;
TCNT0=0x00;
OCR0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: Timer 1 Stopped
// Mode: Normal top=FFFFh
// OC1A output: Discon.
// OC1B output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer 1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=0x00;
TCCR1B=0x00;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer 2 Stopped
// Mode: Normal top=FFh
// OC2 output: Disconnected
ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
// INT2: Off
MCUCR=0x00;
MCUCSR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x00;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
// ADC initialization
// ADC Clock frequency: 1000.000 kHz
// ADC Voltage Reference: AVCC pin
// ADC High Speed Mode: On
// ADC Auto Trigger Source: None
// Only the 8 most significant bits of
// the AD conversion result are used
ADMUX=ADC_VREF_TYPE & 0xff;
ADCSRA=0x82;
SFIOR&=0xEF;
SFIOR|=0x10;
// LCD module initialization
lcd_init(16);
// Global enable interrupts
lcd_gotoxy(2,0);
lcd_putsf("Alat Pengukur");
delay_ms(1000);
lcd_gotoxy(0,1);
lcd_putsf("Kelembaban Tanah");
delay_ms(1000);
lcd_clear();
lcd_gotoxy(4,1);
lcd_putsf("%");
lcd_gotoxy(11,0);
lcd_putsf("<-Led");
while (1)
{
dtadc=read_adc(0); // baca data ADC dari ch.0;
lcd_gotoxy(0,1);
tampil(dtadc);
display();
// Keterangan
if (dtadc<=50){ lcd_gotoxy(6,1); lcd_putsf("Kering "); } if ((dtadc>50) && (dtadc<=90)){ lcd_gotoxy(6,1); lcd_putsf("Lembab "); } if (dtadc>90){
lcd_gotoxy(6,1);
lcd_putsf("Basah ");
}
delay_ms(100);
};
}
Selesai